FAQ robolink® W – Kit di costruzione con giunto per robot
Domande frequenti
1) Che tipi di giunti igus® sono disponibili in magazzino?
Al momento ci sono 6 tipi diversi di giunti standard
1 – RL-50-PL1: giunto oscillante2 – RL-50-TL1: giunto rotante
3 – RL-50-001: giunto a 2 assi con angolo di oscillazione di +/-90° ("IL classico")
4 – RL-50-002: giunto a 2 assi con angolo di oscillazione di +130°/-50° ("asimmetrico")
5 – RL-50-003: giunto a 2 assi con angolo di oscillazione di +180°/0° ("pieghevole")
6 – RL-90-BL1: giunto di base con 2 assi, ("più grande e più potente")
Inoltre, se necessario, possono essere fornite anche versioni speciali dei giunti.
2) Quali impostazioni angolari sono possibili? Pesi propri? Coppie?
L'elenco riportato qui di seguito fornisce alcune informazioni di base. Questa tabella è disponibile anche nel nostro catalogo.| Numero d'ordine | Numero cavi |
Angolo di oscillazione |
Angolo di rotazione |
Peso | Carico max. | ||||
|---|---|---|---|---|---|---|---|---|---|
| Proprio azionamento |
Passanti possibili |
Standard (con dente di fermo) |
Opzione (*senza dente di fermo) |
Standard (con dente di fermo) |
Opzione (*senza dente di fermo) |
[gr] | Oscillazione [Nm] |
Rotazione [Nm] |
|
| 1. Giunto oscillante RL-50-PL1 |
2 | 4 | 180° (±90°) | 210° (±105°) |
- | - | 235 | 12 | - |
| 2. Giunto rotante RL-50-TL1 |
2 | 8 | - | - | 340° (±170°) |
540° (±270°) |
245 | - | 5 |
3. Giunto |
4 | 4 | 180° (±90°) |
210° (±105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
4. Giunto |
4 | 4 | 180° (+130°/-50°) |
240° (+135°/-105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
| 5. Giunto a 2 assi RL-50-003 |
4 | 4 | 180 ° (+180°/0°) |
235° (+180°/-55°) |
340° (±170°) |
540° (±270°) |
400 | 12 | 5 |
| 6. Giunto di base RL-90-BL1 |
4 | 8 | 180° (±90°) |
190° (±95°) |
180° (±90°) |
- | 1250 | 20 | 10 |
3) Come possono essere combinati i giunti?
Ogni singolo giunto è già montato con il sistema a filo. In ogni caso i cavi devono essere fatti passare attraverso il giunto sottostante. Ciò significa che non è possibile creare qualsiasi tipo di combinazione con i giunti. È possibile però unire i singoli giunti con grado di libertà da 1 a 6 DOF e implementare così cinematiche molto diverse tra loro. Saremo lieti di offrirvi la nostra consulenza. La seguente illustrazione mostra alcune possibili combinazioni, se però si prendono in considerazione anche i tipi di giunti più recenti, come per esempio l'RL-50-003 e RL-90-BL1, le possibilità sono innumerevoli!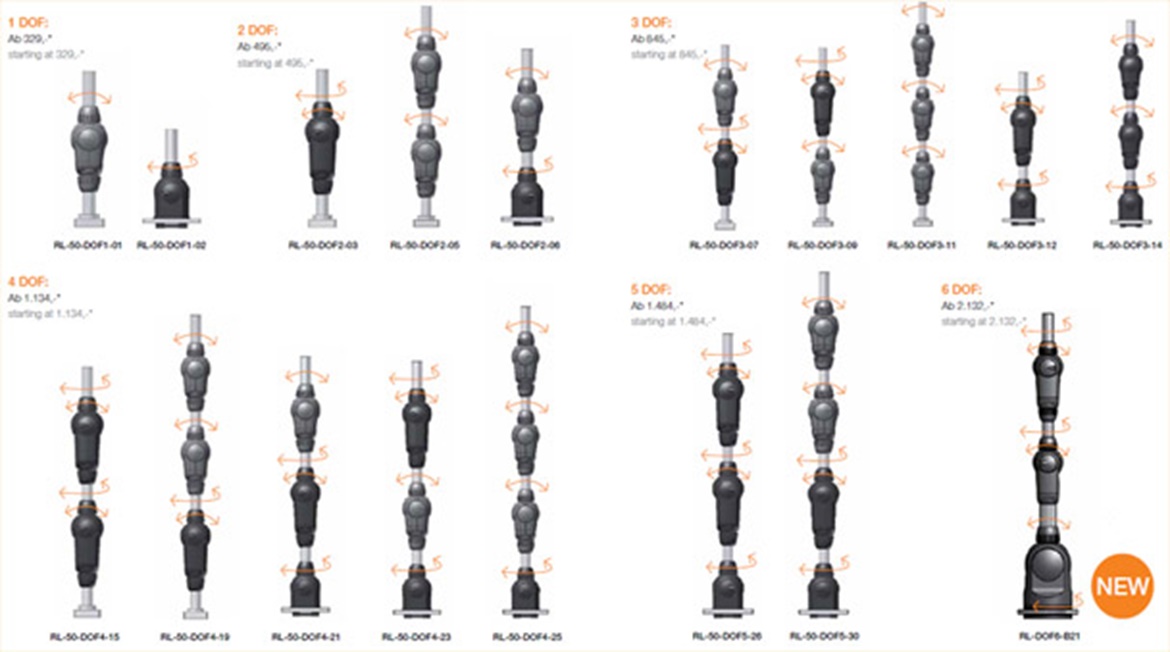
4) Cosa si intende per "Sistema kit modulare"?
L'idea che sta alla base del kit modulare di costruzione robolink® è di fornire ai nostri clienti componenti (meccanici) singoli che possano essere utilizzati per costruire un sistema robot. A seconda della complessità del sistema richiesto, è possibile configurare e ordinare bracci articolati con gradi di complessità variabile. igus® crea i bracci in conformità con le disposizioni accordate con i clienti e fornisce unità pronte per essere collegate. Purtroppo non è possibile unire semplicemente i singoli giunti (come se fossero "mattoncini LEGO®").5) Perché non è possibile modificare direttamente i bracci articolati?
Tutti i giunti sono azionati tramite un sistema a filo. Per ogni grado di libertà sono necessari 2 cavi (meccanismo antagonista). Se i cavi del giunto superiore (2) passassero attraverso il giunto inferiore (1) senza guida, i movimenti dei due giunti non sarebbero più indipendenti l'uno dall'altro. Per ottenere questa indipendenza, è necessario che la tensione del cavo del giunto superiore (2) sia disaccoppiata dai movimenti del giunto inferiore (1). Ciò è possibile mediante uno speciale sistema con cavo Bowden nell'apertura del giunto inferiore (vedere illustrazione). In questo modo i cavi si muovono liberamente, l'uno vicino all'altro, all'interno dei tubi di collegamento tra i giunti.Se si effettua un ordine per bracci articolati multiasse di igus, tutti gli elementi del cavo Bowden sono già montati e l'intero sistema viene consegnato già pronto per essere collegato, cioè con tutti i cavi e i tubi nella configurazione desiderata.

Tubo pneumatico (manipolatore)
2Cavo Bowden da quattro
3Cavo sensore - giunto 2
44 cavi si muovono liberamente all'interno del tubo
5Cavo Bowden singolo per la rotazione
68 cavi si muovono liberamente all'interno del tubo
6) Quanto devono essere lunghi i cavi e quali forze devono essere applicate per azionare i giunti?
Il tirante dei cavi all'interno dei giunti è definito dalla dimensione predefinita del cavo stesso:RL-50: Diametro effettivo 50 mm (movimento rotante e oscillante)
RL-90: Diametro effettivo 90 mm (movimento oscillante), o 120 mm (movimento rotante)
La lunghezza del cavo per un giunto RL-50 è quindi calcolata come segue
π x d/4 ≈ 39 mm per un movimento angolare di 90°
π x d/2 ≈ 79 mm per un movimento angolare di 180°
Le forze tiranti del cavo (a seconda della coppia applicata) possono raggiungere i 600 N.
7) Qual è il contenuto della fornitura di un giunto?
Giunto montato in plastica (PA 2200), alloggiamento cuscinetti incluso (alluminio anodizzato duro = standard)
Cavi Dyneema
Aste in alluminio (standard = 100 mm incluse in ogni caso, lunghezze speciali su richiesta)
Sensori angolari opzionali (-WS), cavo sensore da 3 m, montato e testato. I raccordi terminali dei cavi utilizzati come materiale di connessione sono forniti gratuitamente come da accordi con il cliente.
8) Qual è il contenuto della fornitura di un braccio articolato?
Tutti i giunti sono premontati, come specificato nel punto 7)
Tutti i cavi vengono fatti passare attraverso i segmenti speciali del cavo Bowden, come specificato nel punto 5)
I tubi in alluminio tra i giunti sono personalizzati in base alle richieste del cliente
Piastra di fissaggio alla base del braccio
I cavi del sensore già infilati (opzione -WS), rispettivamente 3 m di cavo inseriti e testati. I raccordi terminali dei cavi utilizzati come materiale di connessione sono forniti gratuitamente come da accordi con il cliente.
9) Qual è il contenuto della fornitura di un "sistema completo"?
Braccio articolato come descritto nella domanda 6), ma con anche gruppo di comando MIT composto da:motori passo passo igus®, numero corrispondente al numero di assi del braccio
Cambio planetario per ogni motore
"Ruota di azionamento" per connettere i cavi al sistema di azionamento
"Strumento di tensionamento" per un facile ritensionamento delle ruote di azionamento
Sono disponibili diverse versioni dell'alloggiamento nel quale sono inseriti i motori e sul quale è montato il braccio
NON è incluso quanto segue:
Manipolatore (disponibile come optional fornito da igus®, ma si prestano anche altri prodotti)
Componenti di comando
Cavi motore (disponibili come optional forniti da igus®)
10) Quali sensori angolari sono utilizzati?
All'interno dei giunti ci sono sensori angolari incrementali (opzionali) forniti da Austriamicrosystems (AS5304A). Al momento non è tecnicamente possibile avere encoder assoluti. Per poter definire la posizione zero, utilizziamo un sensore Hall situato al centro del campo di oscillazione / rotazione di un giunto. Ciò significa che, quando si accende l'alimentazione, per prima cosa bisogna procedere all'inizializzazione del giunto. Per maggiori informazioni sul cablaggio dei sensori e l'assegnazione dei conduttori, fare riferimento alla nostra documentazione tecnica.La risoluzione degli encoder è (diversa per ogni giunto!):
4.640 segnali / 360° per tutti i movimenti rotatori della serie di giunti RL-50
(29 coppie di poli x 160 segnali / coppia di poli) ≈ 0,078°
4.960 segnali / 360° per tutti i movimenti oscillatori della serie di giunti RL-50
(31 coppie di poli x 160 segnali / coppia di poli) ≈ 0,073°
9.920 segnali / 360° per tutti i movimenti della serie di giunti RL-90 ("Base")
(62 coppie di poli x 160 segnali / coppia di poli) ≈ 0,036°

Sensore Hall per movimenti rotatori
2Encoder per movimenti rotatori
3Encoder per movimenti oscillatori
4Sensore Hall per movimenti rotatori
sensori angolari incrementali magnetici. I sensori hanno una risoluzione di ~0,07° per asse. Tutte le unità sensore sono pronte per essere installate sui relativi giunti, ciascuna con 3 m di cavo (6 cavi di collegamento per ogni DOF)
11) I bracci articolati possono essere utilizzati anche in acqua?
Sì, i componenti in pratica sono realizzati in plastica (PA2200), alluminio anodizzato, acciaio inossidabile (viti), cavi Dyneema (PE), con raccordi terminali in ottone. È possibile ordinare sensori stampati (-SE = encoder sigillato).

12) Quali sono i tipi di azionamento possibili?
Per azionare i cavi è possibile utilizzare diversi tipi di sistemi di azionamento. Sono possibili per esempio i sistemi di azionamento manuali ("a leva"), componenti pneumatici (per esempio muscoli pneumatici) o motori elettrici (motori BLDC, motori DC, servomotori, motori lineari, motori passo passo). igus® può fornire motori passo passo con cambi planetari come possibile sistema di azionamento. Sono disponibili:- motore passo passo NEMA23 (versione con cavi standard o con connettore) con cambio planetario 1:16
- motore passo passo NEMA17 (versione con cavi standard o con connettore) con cambio planetario 1:35
Motore passo passo
2Cambio planetario
3Ruota di azionamento tensionabile

13) Come sono controllati i bracci articolati robolink®?
igus® non sviluppa, costruisce o vende i componenti di comando. Il contenuto della fornitura di un sistema robolink® si limita al solo braccio articolato o al braccio articolato con "gruppo di comando".I componenti di comando devono essere forniti o acquisiti direttamente dai clienti.
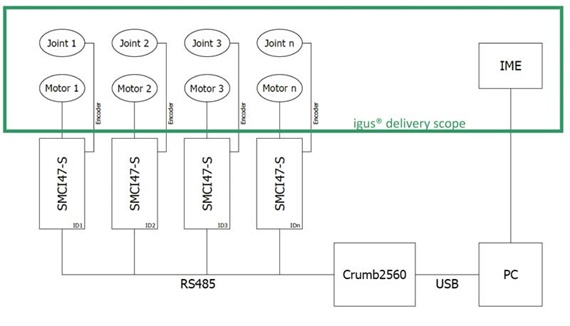
14) Cosa devo fare per poter utilizzare il software open-source IME (igus motion editor) di igus®?
Il software è disponibile gratuitamente per il download. Il software è sotto forma di interfaccia utente grafica che permette di programmare e salvare semplici movimenti. Non è incluso alcun sistema di controllo di contornatura (o di cinematica inversa).15) Che materiali vengono utilizzati?
Giunti: Componenti in poliammide PA 2200, viti in acciaio inossidabile, anelli cuscinetto in alluminio anodizzato duro, in alternativa in iglidur® J o acciaio inossidabile.Tubi di collegamento: Alluminio anodizzato, in alternativa GRP o CRP
Cavi:cavi Dyneema con raccordi terminali in ottone.
16) Quali manipolatori possono essere utilizzati?
Con i nostri bracci robot articolati è possibile combinare qualsiasi tipo di manipolatore. Data la relativamente bassa capacità di carico del sistema, i manipolatori dovrebbero essere il più leggeri possibile. Sul mercato vi è una vasta gamma di manipolatori pneumatici leggeri, per esempio prodotti da SCHUNK, FESTO o FIPA. Se l'uso di componenti pneumatici non è auspicabile, come capita spesso, è necessario usare manipolatori elettrici. Sul mercato vi sono alcuni manipolatori elettrici molto leggeri come per esempio quelli prodotti da GIMATIC, SCHUNK o SOMMER (che però costano decisamente molto di più rispetto ai semplici manipolatori pneumatici). Dal 2013, igus® fornisce semplici manipolatori in plastica, il cui motore elettrico è situato nel tubo robolink®. Come opzione, le griffe dei manipolatori possono essere progettate individualmente qui.17) Quanto costano i giunti o i "sistemi"?
Tutti i prezzi dei singoli giunti e sistemi sono disponibili nel nostro catalogo. Come regola generale, un "sistema completo" con motori, cambi, alloggiamenti, giunti e sensori costa poco più di 1.000 € per asse. In altre parole, si sta parlando di circa 6.000 € per un sistema a 6 DOF. Un braccio articolato SENZA motori (ma con sensori) costa circa la metà (quindi circa 500 € per asse). Esempio:6 DOF ~ 3.000 €

6 DOF ~ 6.000 €

